
【PDAF】高通平台PDAF校准流程及思考
更新记录:
V1 2020.09.17 记录高通平台PDAF校准一般流程
关键字:
高通Qualcomm,PDAF calibration,Gain map,DCC,
AF水平方向行程校准
1.校准环境及软件配置设定
1.1 模组上表面要与测试chart平行,也就是要朝向chart,水平方向对焦
1.2 模组表面到光源距离,根据模组产品规格定义,下面只介绍一般情况:
macro:近焦:2cm,远焦10cm
wide:近焦:10cm,远焦10m
tele:近焦:40cm,远焦10m
1.3 测试chart,目前大多数模组厂都是用棋盘格,测SFR的chart,测试MTF的chart方法也可以;
1.4 软件设定:sensor 最佳有效尺寸,mirror/flip都关闭,sensor Gain为1x,
2.测试标准
近焦,远焦,测试中心SFR或MTF最大时的DAC值为其Code;
然后这两个值烧录到eeprom对应的map位置中;
AF姿势差校准
需要烧录三个方向的DAC值:水平,向上,向下
要在马达的线性区间内测试
测试200颗左右模组的数据,计算出三个数据的均值,烧录
操作方法一:
1.判断马达的线性区间位置,比如wide是50cm位置,tele在1m的位置
2.固定位置,将镜头分别朝着三个方向计算其SFR或MTF最大时的DAC值;
3.反复200颗,取平均值将三个DAC值烧录到EEPROM中
操作方法二:
1.使用激光测距仪
2.三个方向在线性区间内,设置步长移动
3.记录下不同的方向下,不同的dac值对应的不同的距离,
4.然后在相同距离下,不同的dac两两相减,
5.多取几个点,计算均值得到这颗模组的姿势差值;
6.反复200颗,取平均值将三个DAC值烧录到EEPROM中
Qualcomm PDAF校准
1. Gain map校准
1.1 校准环境及软件配置设定
1.1.1 D50色温,照度在1000lux,保持光源纯洁,无其他光源进入
1.1.2 模组表面到光源的距离:1~2cm内,或者再近一点也可以;
1.1.3 mirror/flip都关闭,sparsed pd 2×1 PD的sensor,sensor gain是1x,2PD sensor是2x,lens position要推到无限远
1.2 操作流程
1.2.1 将模组表面到光源的距离1cm内,且保持与光源平面平行
1.2.1 调整曝光时间,使画面中心1/10的ROI区域的G通道的值在10bit的900左右(不去除OB),拍摄一张raw,高通的DLL会自动计算出Gain map数据;
1.2.3 保存gain map数据到EEPROM中;
2.DCC map校准
2.1 校准环境及软件配置设定
2.1.1 D50色温,照度在chart上1000lux
2.1.2 模组到chart的距离:infinity dac值和macro dac值的差的一半的dac值对应的物距
2.1.3 测试chart:竖条纹或菱形chart,建议竖条纹;

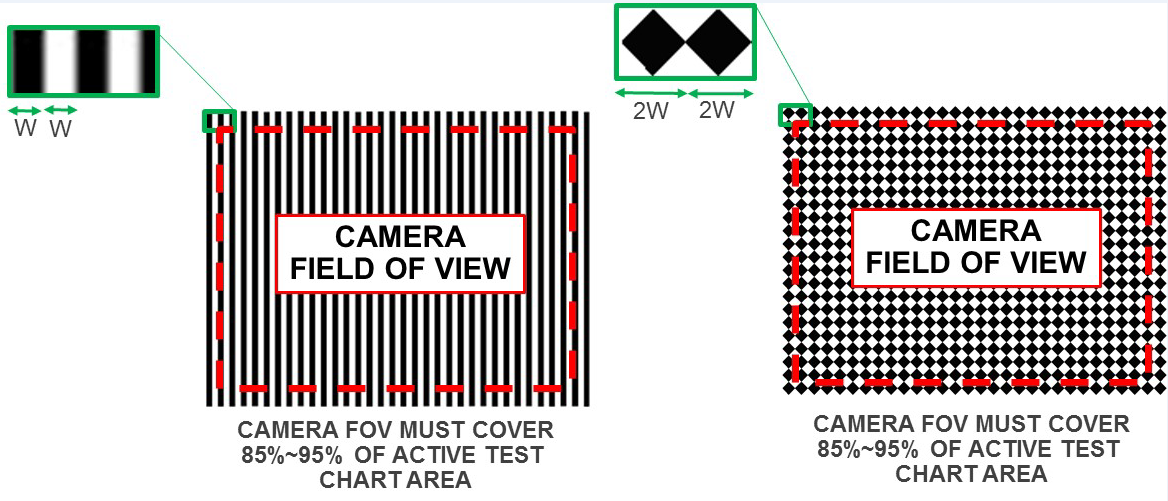
W[mm] = (a[mm] – f[mm]) / f[mm] * 0.11[mm]
a是值测试chart到模组的物距,也就是计算出来的inf和macro中间dac对应的物距
f是有效焦距
2.1.4 mirror/flip都关闭,sensor尺寸要保持和驱动中使用的一致,sparsed pd 2×1 PD的sensor,sensor gain是1x,2PD sensor是2x,
2.1.5 调整曝光时间,使画面中心1/10的ROI区域的白色区域的值在10bit的900左右(不去除OB)
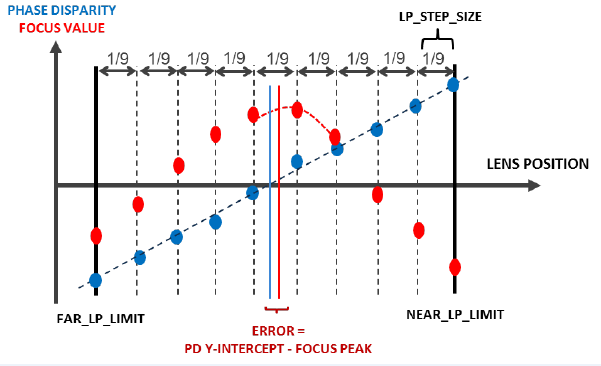
2.1.6 将AF水平方向行程校准中获取的infinity和macro值,区间分成9段,一共10个值,每次移动一步,拍一张10bit raw,传入到高通校准工具中;

2.1.7 调用PDAF_cal_get_dccmap()函数计算获取DCC map数据,
2.1.8 其中校准验证的tolerance,是infinity和macro差值的百分比,根据不同的sensor要设置不一样,2pd是10%,sparse pd是20%,2×1 pd是15%
2.1.9 烧录数据到EEPROM
以上是各家模组厂大概的AF和PDAF校准流程,但是其中我们有很多地方需要分析研究的地方,用来提高改善PDAF的效果;
如下是我个人的一些想法:
1. gain map校准时的亮度值对gain map的影响,加不加毛玻璃有什么区别?
2. DCC校准时,模组厂有没有准守模组到测试chart的距离是按照上述描述的位置来操作,以及测试chart是否按照公式重新制作的chart,这些都会影响PD的计算;
3. 温度对校准的影响?这个要看温漂的变化程度
4. 最重要的DCC 的tolerance的设置,因为最后验证pd时会计算出一个PD值的位置和10个位置fv进行曲线拟合会出一个位置进行比较,偏差系数就是tolerance,不同的模组infinity和macro值差值是不同的,系数还是那个系数,这个误差就很大了,需要实测评估分析;
现在在L8版本中高通更新PD offset map的校准以及Field curvature calibration,都是为了来配合算法改善对焦效果,个人分析,校准的好坏在后续算法的使用至关重要,AF是个系统的工作,每个环节都要研究其最优的做法;这样在后端AF行为和精准调试的时候才会效果好;
感兴趣的读者,欢迎联系站长深入交流;






